Core Animation 3D 仿射变换知识
之前写的Core Graphics是2D平面上的坐标变换,而iOS开发中,为了实现复杂的动画效果,视图切换效果,会用到很多3D变换,这就是Core Animation提供的CATransform3D,其中大部分API都和2D情况类似,但这里需要详细解释一下透视投影这个概念,和m34这个值的真实来源,一些博客抄来抄去却没有点到点子上,让人看不下去……
变换矩阵
1 | typedef struct CATransform3D { |
这个结构体对应的是这样一个4x4的变换矩阵:
$ \begin{bmatrix} m11 & m12 & m13 & m14 \\ m21 & m22 & m23 & m24 \\ m31 & m32 & m33 & m34 \\ m41 & m42 & m43 & m44 \end{bmatrix} $
矩阵定义的顺序和结构体一致,先行后列(注意,那个《Core Animation Advanced Techniques》矩阵的图是错误的,行列画反了),则对应的矩阵乘法为
$ \begin{bmatrix} x & y & z & 1 \end{bmatrix} \times \begin{bmatrix} m11 & m12 & m13 & m14 \\ m21 & m22 & m23 & m24 \\ m31 & m32 & m33 & m34 \\ m41 & m42 & m43 & m44 \end{bmatrix} = \\ \begin{bmatrix} m11x+m21y+m31z+m41 & m12x+m22y+m32z+m42 & m13x+m23y+m33z+m43 & m14+m24+m34+m44 \end{bmatrix} $
注意:
- 这里定义的向量最后一位表示齐次向量元素,如果不为1,需要再化为齐次坐标(通常情况可以取m14,m24,m34,m44为0,0,0,1),对应真正的x,y,z坐标
$ \begin{bmatrix} \frac{m11x+m21y+m31z+m41}{m14+m24+m34+m44} & \frac{m12x+m22y+m32z+m42}{m14+m24+m34+m44} & \frac{m13x+m23y+m33z+m43}{m14+m24+m34+m44} \end{bmatrix} $
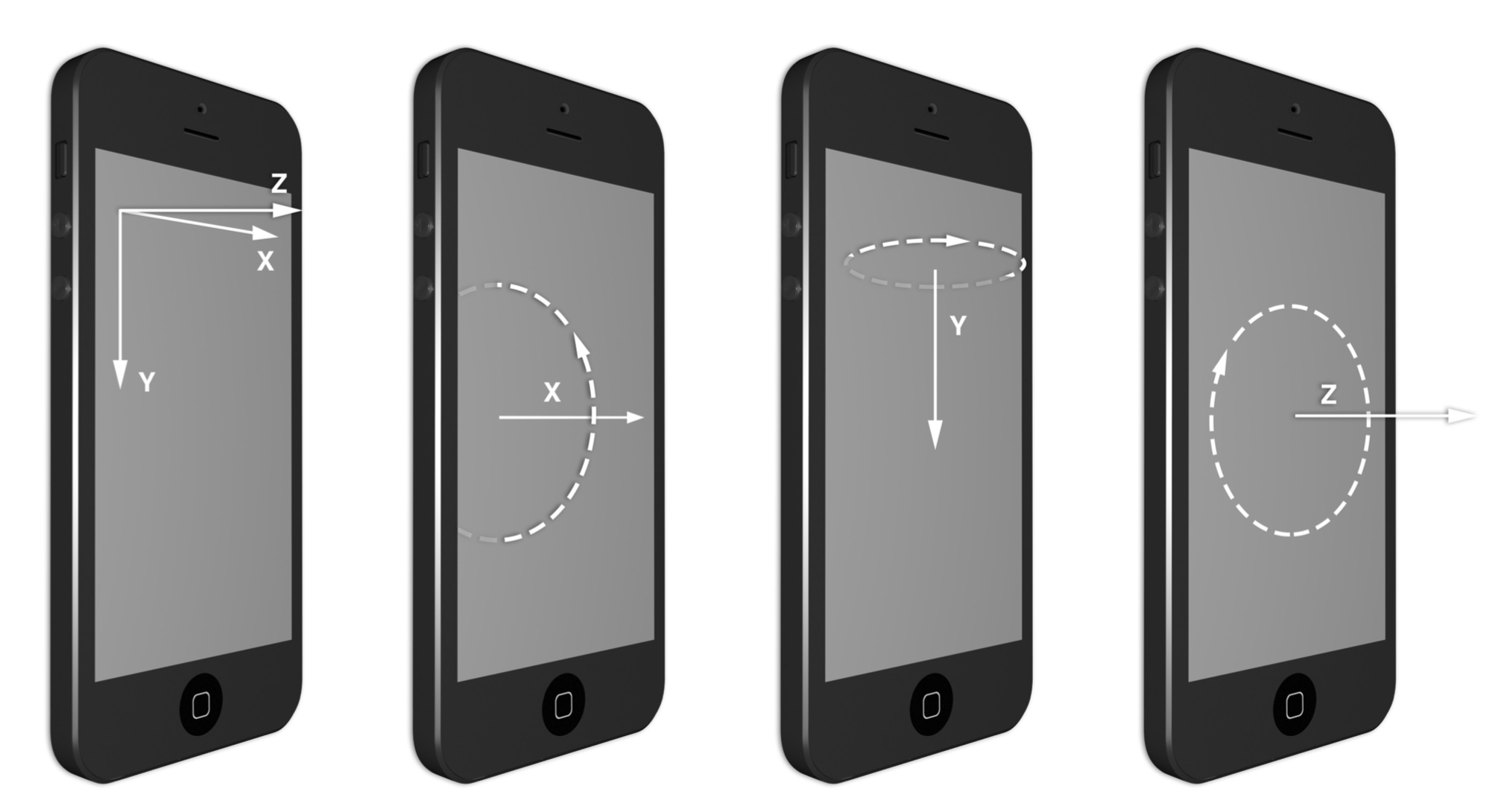
- iOS设备上,是按照左手系的三维空间,即正面面对设备屏幕,坐标原点从屏幕左上方起,x轴指向右方,y轴指向下方,z轴为屏幕指向眼球。而macOS上是右手系,原点是屏幕左下角,x轴指向右方,y轴指向上方(相反),z轴同样为屏幕指向眼球,要注意
平移
类似二维空间的平移,变换矩阵第四行的m41,m42,m43对应的就是x、y、z的平移量,因此矩阵变换很简单,比如将[x,y]向量平移到[x+a,y+b,z+c]:
平移矩阵:
$ \begin{bmatrix} x & y & z & 1 \end{bmatrix} \times \begin{bmatrix} 1 & 0 & 0 & 0 \\ 0 & 1 & 0 & 0 \\ 0 & 0 & 1 & 0 \\ a & b & c & 1 \end{bmatrix} = \begin{bmatrix} x+a & y+b & z+c & 1 \end{bmatrix} $
对应构造API:
1 | CATransform3D CATransform3DMakeTranslation(CGFloat tx, CGFloat ty, CGFloat tz); |
缩放
同二维空间的缩放,我们需要对向量坐标乘以系数,那么构造出来一个对角矩阵即可
缩放矩阵:
$ \begin{bmatrix} x & y & z & 1 \end{bmatrix} \times \begin{bmatrix} a & 0 & 0 & 0 \\ 0 & a & 0 & 0 \\ 0 & 0 & a & 0 \\ 0 & 0 & 0 & 1 \end{bmatrix} = \begin{bmatrix} ax & ay & az & 1 \end{bmatrix} $
对应的构造API:
1 | CATransform3D CATransform3DMakeScale(CGFloat sx, CGFloat sy, CGFloat sz); |
旋转
参考二维的旋转,二维的旋转我们讨论的是某个layer,以它自身的anchorPoint为原点,通过顺时针逆时针的旋转。但是对于三维来说旋转就麻烦了,因为向量不会仅仅在XoY平面上。虽然实际上可以定义绕任意轴旋转,但是一般我们只研究绕三个坐标轴(x,y,z)的旋转。其中,对于绕z轴的旋转,可以看作等价于二维的旋转(XoY平面内),但绕x和绕y就超出了屏幕
对于绕坐标轴,我们可以把对应旋转平面的投影看成二维的情况,因此前面推导过的旋转矩阵同样适用于三维绕轴情况,只需要针对不同坐标轴选定不同的坐标罢了,即通过把前一篇推导方程替换x,y,z变量得到:
$ \begin{cases} x^{‘} = x \cos \theta - y \sin \theta \\ y^{‘} = y \cos \theta + x \sin \theta \\ z^{‘} = z \end{cases} $
绕x轴的旋转矩阵(固定x,从y旋转到z,即用y替换x,z替换y,x替换z):
$ \begin{bmatrix} x & y & z & 1 \end{bmatrix} \times \begin{bmatrix} 1 & 0 & 0 & 0 \\ 0 & \cos \theta & \sin \theta & 0 \\ 0 & - \sin \theta & \cos \theta & 0 \\ 0 & 0 & 0 & 1 \end{bmatrix} = \begin{bmatrix} x & y \cos \theta - z \sin \theta & z \cos \theta + y \sin \theta& 1 \end{bmatrix} $
绕y轴的旋转矩阵(固定y,从z旋转到x,即用z替换x,x替换y,y替换z):
$ \begin{bmatrix} x & y & z & 1 \end{bmatrix} \times \begin{bmatrix} \cos \theta & 0 & - \sin \theta & 0 \\ 0 & 1 & 0 & 0 \\ \sin \theta & 0 & \cos \theta & 0 \\ 0 & 0 & 0 & 1 \end{bmatrix} = \begin{bmatrix} x \cos \theta + z \sin \theta & y & z \cos \theta - x \sin \theta & 1 \end{bmatrix} $
对应API:
1 | CATransform3D CATransform3DMakeRotation(CGFloat radians, CGFloat x, CGFloat y, CGFloat z); |
注意:这个API中,radians是弧度不用说,x,y,z分别介于[-1,1]之间,表示一个任意的单位向量([x,y,z]的长度是1,比如设置[1,0,0]就指的是绕x轴正方向旋转对应弧度值,前面解释过iOS和macOS的正/负弧度对应顺/逆时针了)
错切
类似二维的情况,比如对z轴依赖不变,x和y线性变换,那么对应的就是m12和m21,也是没有专门的API,用CATransform3DIdentity 便携初始化结构体创建一个吧,设置对应的矩阵值即可
错切矩阵:
$ \begin{bmatrix} x & y & z & 1 \end{bmatrix} \times \begin{bmatrix} 1 & m21 & 0 & 0 \\ m12 & 1 & 0 & 0 \\ 0 & 0 & 1 & 0 \\ 0 & 0 & 0 & 1 \end{bmatrix} = \begin{bmatrix} x+m12y & m21x+y & z & 1 \end{bmatrix} $
手动构造API:
1 | //The identity transform: [1 0 0 0; 0 1 0 0; 0 0 1 0; 0 0 0 1] |
透视投影
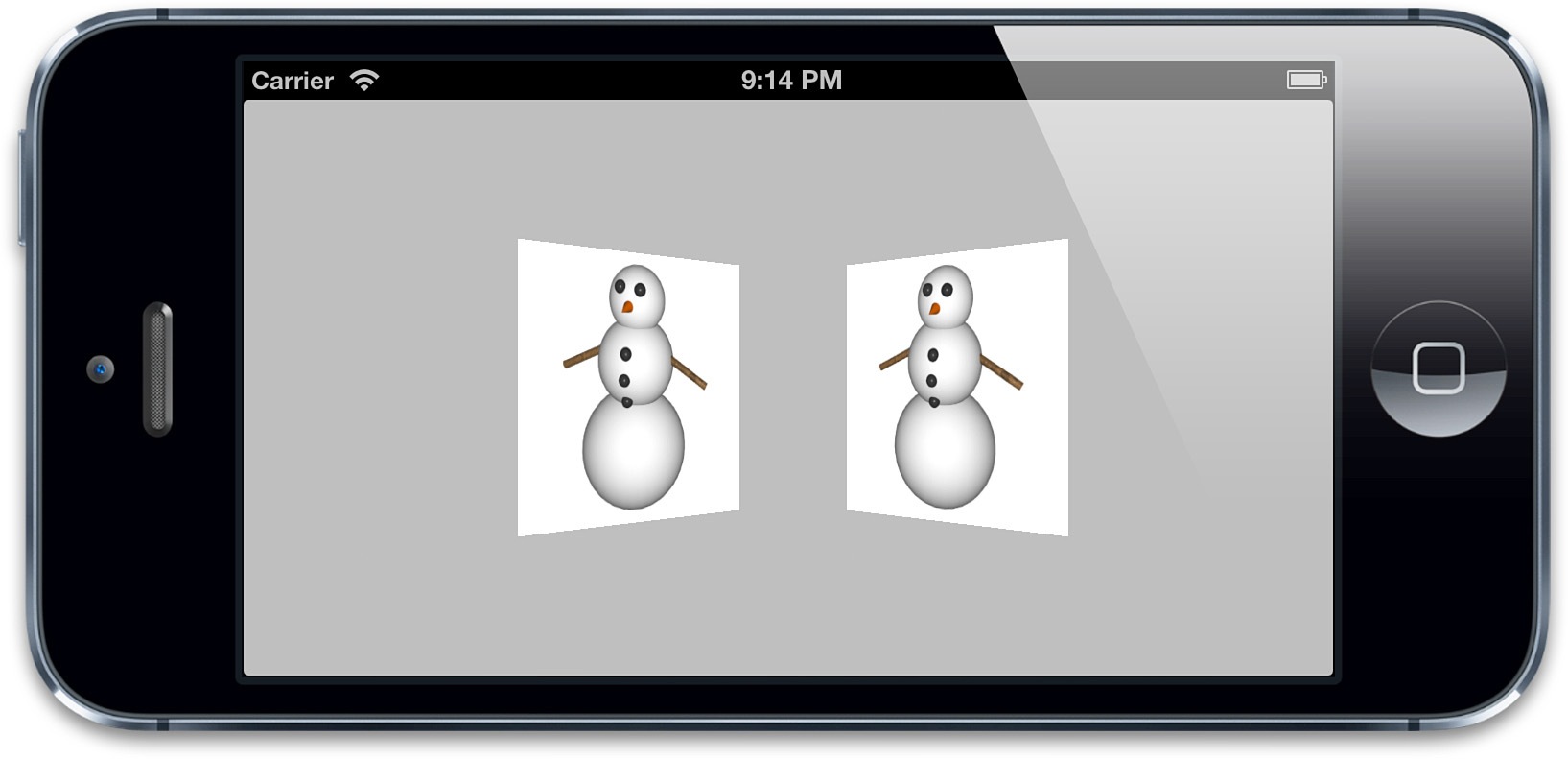
实际中你如果直接使用旋转,会注意到旋转前后,结果看起来竟然和普通的缩放一模一样,这是为什么呢?原因其实很简单,假如绕y轴旋转,空间中的图层虽然旋转了,但是显示到XoY平面(也就是iPhone的屏幕上)的时候,会把3D的物体进行正投影,这样子看上去就像是左右压缩一样
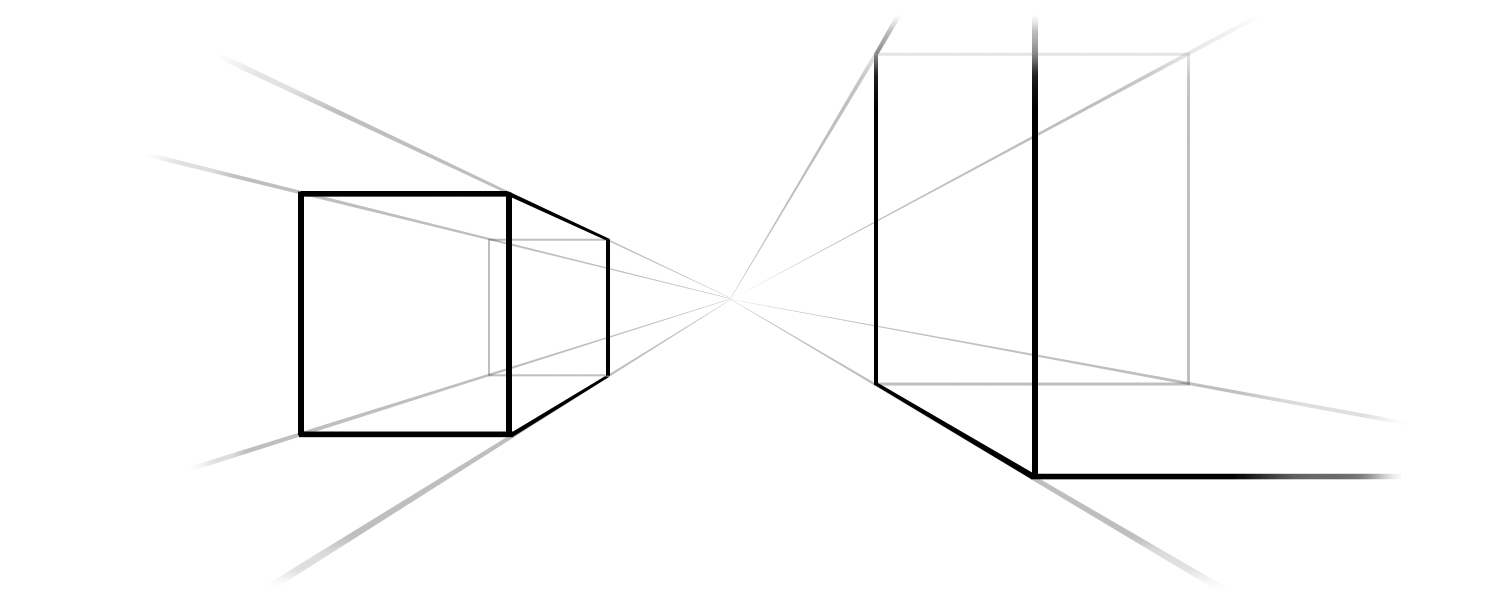
而学过绘画的都知道人的视野并不是平行的,而是有一个透视图的概念,眼睛前有实际平行的两条线段发出(相当于z轴方向的向量),人眼看起来会相交于一点上(焦点,Focal point),这才产生了3D感
而对于变换矩阵,如果要实现透视投影,应该怎么办?这里就用到了前面介绍过但一直忽略的值m34
原理和推导:
为什么单单修改一个m34的值,就能达到这种透视3D的效果呢?我简单看了很多类似的博客都没有正面回答这个问题,其实这是变换矩阵的透视投影结论,可以通过简单的数学推导得到
Core Animation已经定义了焦点的x,y坐标,就是这个图层的anchorPoint(锚点),同时取z=0的XoY平面作为图像平面(也就是iPhone的屏幕平面),那么假如我希望投影中心到图像平面的距离是d,可以假设焦点坐标为(0,0,d),现在对m34的值进行赋值为w,初始向量坐标为(x,y,z),开始推导:
矩阵乘法:
$ \begin{bmatrix} x & y & z & 1 \end{bmatrix} \times \begin{bmatrix} 1 & 0 & 0 & 0 \\ 0 & 1 & 0 & 0 \\ 0 & 0 & 1 & w \\ 0 & 0 & 0 & 1 \end{bmatrix} = \begin{bmatrix} x & y & z & zw+1 \end{bmatrix} $
此时得到的向量不为齐次,需要进行齐次化,得到真正的坐标:
$ \begin{bmatrix} x^{‘} & y^{‘} & z^{‘} \end{bmatrix} = \begin{bmatrix} \frac{x}{zw+1} & \frac{y}{zw+1} & \frac{z}{zw+1} \end{bmatrix} $
最后对XoY平面进行投影,则最终看到的二维向量应该为$ (\frac{x}{zw+1}, \frac{y}{zw+1}) $
现在考虑x轴的情况(y轴同理),我们知道真实三维空间的x坐标是x,
现在得到透视投影下的x坐标是x/(zw+1)
为了得到d和w的关系,这里引用一幅图,绿色的点为原始点,红色的点为投影到XoY平面上的点,我们这里推导不需要管具体的值,只是为了更清晰地发现规律:
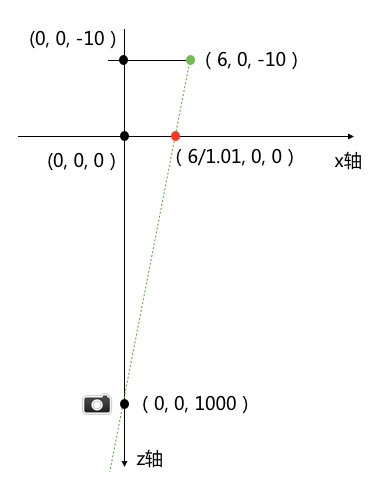
$ \because 由图,依据相似三角形原理 \\ \therefore \left| \frac{x}{zw+1}: x \right| = d : (\left|z\right|+d) \\ 去绝对值号,且d\neq0,x\neq0,得 \\ \frac{1}{zw+1} = \frac{1}{1-\frac{z}{d}} \\ \therefore w = - \frac{1}{d} $
这样就得到重要的结论:w=-(1/d),即,假定焦点(就是人眼)距离原点距离为d,则m34应当填写-(1/d)
默认初始变换矩阵的m34都是0,也就是说认为焦点无限远,因此看起来没有任何3D感。同时,我们也知道,假如我们取d越大,则看起来越没有投射和3D感;取d越小,则3D感和失真感越强烈,一般推荐的d值在500~1000之间,也就是说m34填写-1/500即可
设置变换矩阵的m34:
1 | CATransform3D transform = CATransform3DIdentity; |
总结
Core Animation提供的CATransform3D主要的几个变换都在这里介绍了,尤其是透视投影,一定要理解原理,知道为什么需要修改m34来控制透视焦点。
当然,实际上CATransform3D主要用来作各种3D动画效果,比如你可以自定义一个View的转场效果,搞个3D相册,甚至可以在不需要接触OpenGL的情况下写个小游戏(比如魔方啊之类),对于iOS进阶非常有帮助。最近有点忙没太关注,感觉自己还是需要学习一个。